在国家星空彩票官方苹果版项目(批准号:T2121003)等资助下,北京航空航天大学机械工程及自动化学院丁希仑教授、张武翔教授、冯仰刚副教授团队与中国科学技术大学王柳教授,在居家康复机器人仿生系统设计与交互感知方面取得进展。相关研究成果以“面向居家等速训练的无源膝关节康复机器人(Power-free knee rehabilitation robot for home-based isokinetic training)”为题,于2025年3月8日发表在《自然·通讯》(Nature Communications)上,论文链接:https://www.nature.com/articles/s41467-025-57578-z。
随着社会老龄化加速,康复需求激增,但传统商用等速设备体积庞大,且需要高能耗主动驱动,难以普及至居家场景。针对这一挑战,研究团队创新性地提出了一种基于“动态能量再生”的无源仿生机器人系统设计架构。该系统摒弃了传统电机驱动与外部供电模块,采用人体-机械闭环能量流动的仿生设计理念,将人体运动做功转化为系统运行能源,实现了设备的极致轻量化与高集成度。
团队构建了高精度的多模态感知系统,通过集成角度与力矩传感器,系统实现了对膝关节运动状态及人机交互力矩的实时精准感知。基于这一感知能力,机器人能够智能识别患者的运动意图,并动态调节阻力大小。这种“感知-响应”机制不仅模拟了人体肌肉的自然拮抗作用,更实现了高效的能量循环,即“将人体负功转化为可控的康复训练阻力”。
为验证该系统的有效性,团队开展了包括健康受试者与膝关节术后患者在内的临床试验。实验表明,所有受试者的再生/消耗功率比均大于1,验证了系统在不同身体状况下的无源驱动稳定性。为期6周的临床康复训练结果显示,受试者股四头肌与腘绳肌的肌肉横截面积(CSA)分别增长了5.93%和10.27%,肌力力矩分别提升了70%和84%。与现有商用有源设备相比,该无源仿生机器人在肌肉维度增长率及肌力提升幅度上均表现出显著优势。
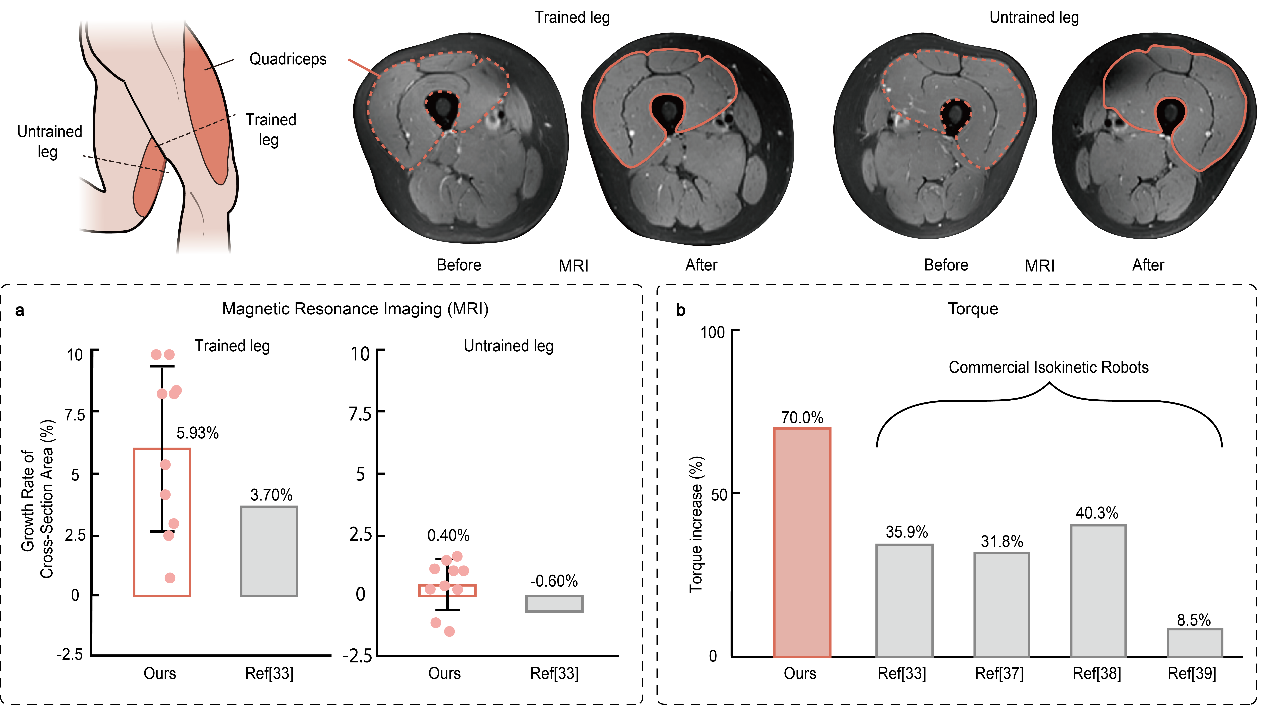
图 无源仿生等速与传统等速系统康复效果对比。(a)MRI横截面增长率; (b)力矩增长率